מאז מלחמת העולם השנייה, ובמיוחד מאז מלחמת וייטנאם, הוכיח המסוק כלי רכב צבאי בסיסי באירועי המלחמה בסוף המאה העשרים ועשרים ואחת. הצלחתה קשורה בעיקר לרב-גוניות בה היא יכולה לבצע משימות שונות: החל מהובלת כוחות ועד פעולות נגד צוללות, מפינוי מהיר של פצועים ועד משימות תמיכה ותמיכה לחיל הרגלים, וכל זאת ללא צורך במסלול ההמראה והנחיתה. . כתוצאה מכך, הספציפיות של כל משימה דרשה פיזור תצורות של כלי רכב אלה מנקודת מבט מבנית, הנעה ואוויונית, כפי שקרה גם בעולם התעופה הקבועה.
גם בתוך אותו "אזור מבצעי" צצו פילוסופיות תעסוקתיות שונות שהובילו לבידול נוסף של האמצעים. הארכיטקטורה של רוטורי המסוקים, למשל, היא היבט שמראה מגוון רחב של עיצובים, שאפשר אפילו למצוא במסוקים עם אותה משימה. רק תחשוב על ה- "אפאצ'י" של בואינג AH-64 ועל ה- KA-50 של קאמוב (צילום פתיחה), שניהם נועדו להיות מסוקי תקיפה אך פותחו עם אפשרויות עיצוב שונות לחלוטין.
מידע כללי על רוטורים

הרוטור הוא האלמנט המכני המורכב מכמה להבים אשר באמצעות סיבוב מייצר את הכוח האווירודינמי הדרוש לטיס ולתמיכה במסוק. הוא מורכב מציר מכני, המונח על ידי מנועי המטוסים, עליו רכוב רכזת. הלהבים מוחלים על הרכזת. ייצור הכוח האווירודינמי מתאפשר בדיוק על ידי סיבוב הלהבים: בעוד שבמקרה של מטוסים זרימת האוויר פוגעת בכנפיים הקבועות עקב תנועתו הקדמית של המטוס עצמו, אולם במקרה של המסוק מדובר ב"כנפיים "( כלומר הלהבים) לנוע, חותכים את האוויר שמסביב (ומכאן ההגדרה של אמצעי כנף סיבוביים).
מרכיב מרכזי נוסף של הרוטור הוא ה- צלחת סוואש, זהו האיבר המכני המאפשר למסוק לנוע לכל כיוון על ידי שינוי הכיוון אליו מתפתח הכוח האווירודינמי שנוצר ועוצמת הכוח הזה. ביסודו של דבר, צלחת הסוואש יכולה לבצע שתי פעולות: לשנות את שכיחות כל להבי הרוטור או לשנות את שכיחות הלהבים בצורה שונה במהלך הסיבוב. הפקודה הראשונה נקראת צעד קולקטיבי ומאפשר לשנות את ערך המעלית המיוצרת, וכתוצאה מכך האחריות לפיקוד על שינוי הגובה של המסוק. הפקודה השנייה נאמרת צעד מחזורי ומטרתו מורכבת בהטיית הרוטור וכתוצאה מכך בכוח האווירודינמי שנוצר, באופן שיפתח רכיב כוח רוחבי המאפשר להזיז את הרכב בארבעת הכיוונים האופקיים (קדימה, אחורה, ימין ושמאל). למעשה, השונות המחזורית של שכיחות הלהבים פירושה שחלק מהלהבים מפתחים יותר הרמה מאחרים וזה גורם לרוטור להטות בכיוון אליו מתפתחת פחות הרמה.
 לכל זה עלינו להוסיף את צריך להציג רוטור שני המייצר כוח (ולכן רגע) המסוגל לנטרל את מומנט הנגד הפועל על מבנה המסוק. למעשה, עבור העיקרון השלישי של הדינמיקה, העובדה שמפעילים מומנט שמגדיר את להבי המסוק בסיבוב פירושם שמקורם של מומנט תגובה שמופנה בכיוון ההפוך על גוף המטוס, הכרוך בסיבוב הרכב סביב ציר הלסת שלו (ציר אֲנָכִי).
לכל זה עלינו להוסיף את צריך להציג רוטור שני המייצר כוח (ולכן רגע) המסוגל לנטרל את מומנט הנגד הפועל על מבנה המסוק. למעשה, עבור העיקרון השלישי של הדינמיקה, העובדה שמפעילים מומנט שמגדיר את להבי המסוק בסיבוב פירושם שמקורם של מומנט תגובה שמופנה בכיוון ההפוך על גוף המטוס, הכרוך בסיבוב הרכב סביב ציר הלסת שלו (ציר אֲנָכִי).
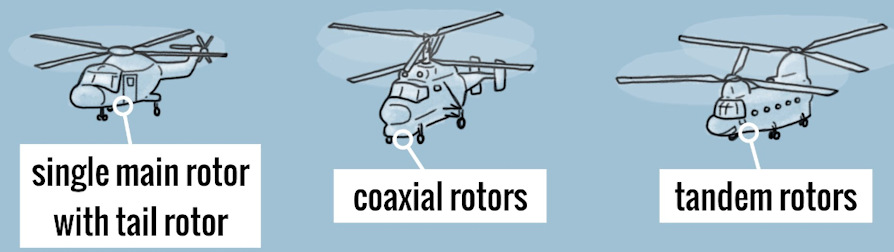
בתוך תצורה קלאסית, הרוטור השני ממוקם בזנב המסוק ומטרתו היחידה לבטל את מומנט התגובה הזה; לכן, הרוטור הראשי מובחן מה- רוטור הזנב, שיש משימות שונות. אדריכלות כזו נוצרה לראשונה על ידי איגור סיקורסקי בשנת 1940.
רוטור הזנב מותקן אנכית (בניצב לרוטור הראשי), כך שמקור המעלית שנוצר הוא מומנט המבטל את מומנט התגובה.
פיתרון שני לפתרון בעיית מומנט התגובה מורכב מאבזור המסוק רוטורים מצמידים מסתובבים נגדכלומר זוג או יותר של רוטורים ראשיים המסתובבים בכיוון ההפוך. באופן זה, לזוגות התגובה המיוצרים יהיה כיוון הפוך וכתוצאה מכך יבטלו זה את זה, מבלי שיהיה לכן צורך להציג רוטור זנב.
לארכיטקטורה זו ארבע תצורות אפשריות:
-
רוטורי טנדם
-
רוטורים קואקסיאליים
-
צומת רוטורים
-
רוטורים רוחביים
ניתוח הארכיטקטורות האפשריות למסוקי תקיפה
אנו מגיעים למקרה של מסוקי תקיפה. בדרך כלל, ארכיטקטורות הרוטור שנבחרו למדיום זה הם קלאסיקה או, במקרים מסוימים, זה עם רוטורים קואקסיאליים נגד סיבוב. אך מהם היתרונות והחסרונות של שתי התצורות?
 הניתוח שלנו יכול להתחיל בהשוואה בין צריכת חשמל משני הנכסים. במקרה של התצורה הסטנדרטית, חלק מההספק שמספק המנוע מועבר לרוטור הזנב כדי לאזן את מומנט הנגד, ולכן מבלי שזה ישמש לתמיכה או להזיז המסוק. במילים אחרות, זה יכול להיחשב ככוח "מבוזבז".
הניתוח שלנו יכול להתחיל בהשוואה בין צריכת חשמל משני הנכסים. במקרה של התצורה הסטנדרטית, חלק מההספק שמספק המנוע מועבר לרוטור הזנב כדי לאזן את מומנט הנגד, ולכן מבלי שזה ישמש לתמיכה או להזיז המסוק. במילים אחרות, זה יכול להיחשב ככוח "מבוזבז".
לעומת זאת במקרה של ארכיטקטורה קואקסיאלית, שני הרוטורים הם עיקריים, כלומר שניהם מייצרים כוח אווירודינמי שימושי להנעת המסוק. כתוצאה מכך, עם אותו כוח המסופק על ידי המנוע וצורתם ומבנה הלהבים, מסוק עם רוטורים קואקסיאליים יוכל לייצר הרמה כוללת גדולה יותר, המתורגמת לעומס מוביל גדול יותר ולדחף גדול יותר בתנועה. הִתקַדְמוּת.
במקרה של התצורה הקלאסית, על מנת להשיג את אותה קיבולת העומס, יהיה צורך להגדיל את הרוטור, אך הדבר יגרום לבעיות של דחיסות בקצות הלהבים. למעשה, המהירות המשיקה בכל נקודת הלהב ניתנת על ידי:

על ידי הגדלת הרדיוס, בקצוות תגיעו למהירויות הקרובות לזו של הצליל. זה יוביל להתפרצות גלי הלם והתנגדות הגל האווירודינמית כתוצאה מכך, ולפגוע במבנה האווירודינמיקה של הלהבים.
 המעלית שמייצרת התצורה הקואקסיאלית, לעומת זאת, אינה כפולה בהשוואה למקרה הסטנדרטי אלא פשוט גדולה יותר, מכיוון שיש להתחשב באינטראקציה האווירודינמית בין להבי שני הרוטורים.
המעלית שמייצרת התצורה הקואקסיאלית, לעומת זאת, אינה כפולה בהשוואה למקרה הסטנדרטי אלא פשוט גדולה יותר, מכיוון שיש להתחשב באינטראקציה האווירודינמית בין להבי שני הרוטורים.
מנקודת מבט אווירודינמית, רוטורים קואקסיאלים מסוגלים לנהל טוב יותר את ההשפעות הנגרמות על ידי הרם אסימטריה.
כדי להסביר תופעה זו, נבחן מסוק עם רוטור ראשי יחיד בטיסה מתקדמת. ניתן לחלק את להבי הרוטור לשתי קבוצות לכל מחזור סיבוב: le להבים מתקדמים הם אלה שנעים באותו כיוון התקדמות כמו המסוק, ואילו ה- להבים נסוגים הם נעים בכיוון ההפוך לזה של קידום הרכב. כתוצאה מכך, הלהבים קדימה ירגישו מהירות רוח יחסית השווה לסכום מהירות המשיק שלהם בתוספת מהירות קדימה של המסוק, ואילו הלהבים הנסוגים ירגישו מהירות רוח יחסית השווה למהירות המשיק שלהם פחות מהקדימה של המסוק. 'כְּלִי טַיִס. כתוצאה מכך, מכיוון שהמעלית קשורה לריבוע המהירות היחסית - -, הלהבים הקדמיים יפיקו יותר הרמה מהנסוגים ("אסימטריה בהרמה"), ויגרמו ליצירת רגע גלגול מסוכן לרכב.
-, הלהבים הקדמיים יפיקו יותר הרמה מהנסוגים ("אסימטריה בהרמה"), ויגרמו ליצירת רגע גלגול מסוכן לרכב.
הפיתרון שנמצא לצמצום תופעה זו מורכב מהשארת להבי הרוטור חופשיים לתנועה אנכית באמצעות יישום צירים, הנקראים "מתנפנף", אשר על ידי שינוי זוויות השכיחות מצליח למזער את ההבדל במעלית בין שני האזורים. למעשה, הלהבים הנסוגים נוטים לנוע כלפי מטה, וכתוצאה מכך מגדילים את זווית ההתקפה שלהם בגלל הרכיב של המהירות האנכית היחסית כלפי מעלה ולכן המעלית מיוצרת. הלהבים קדימה, לעומת זאת, נוטים לנוע כלפי מעלה, ולהפחית את זווית ההתקפה עקב רכיב המהירות האנכית היחסית כלפי מטה ולכן ההנעה המיוצרת.
הבעיה במערכת איזון זו נובעת מכך שככל שמהירותו הקדמית של המסוק גבוהה יותר, כך המהירות היחסית הנתפסת על ידי הלהבים הנסוגים נמוכה יותר, ולכן ככל שזווית ההתקפה צריכה להיות גדולה יותר כדי לייצר את המעלית הנדרשת. לאזן את חוסר הסימטריה. עם זאת, מעבר לזווית התקפה מסוימת הלהבים נעצרים, כלומר הווריד הנוזל מתנתק מנייר הנשימה וגורם לאובדן הגבהה מוחלט ולעלייה בגרירה האווירודינמית. תופעה כזו, הנקראת דוכן הלהב הנסוג, מביא להתהפכות פתאומית של המסוק (המעלית שמייצרים הלהבים הקדמיים מייצרת רגע ביחס לציר הגלגול של המטוס) עם אובדן שליטה כתוצאה מכך. מסיבה זו, לכל מסוק יש מסוים לעולם אל תחרוג מהמהירות, כלומר קצב הזנה שלא ניתן לחרוג ממנו.
 בתצורה עם רוטורים קואקסיאליים, לעומת זאת, עצירת הלהבים הנסוגים מתרחשת באזורים מנוגדים בשני הרוטורים, מכיוון שהם מסתובבים בכיוון ההפוך. כתוצאה מכך, לא נוצר חוסר איזון במעלית בין שני החצאים ולא נוצר שום רגע מתגלגל שהיה גורם להתהפכות המסוק. שם לעולם אל תחרוג מהמהירות במקרה של מסוקים עם תצורה זו הוא גדול יותר משום שהדוכן של הלהב הנסוג אינו מחייב כמו בתצורה הסטנדרטית, אולם הוא תמיד מוגבל על ידי המהירות המפעילה את תופעות הדחיסות בקצות הלהבים.
בתצורה עם רוטורים קואקסיאליים, לעומת זאת, עצירת הלהבים הנסוגים מתרחשת באזורים מנוגדים בשני הרוטורים, מכיוון שהם מסתובבים בכיוון ההפוך. כתוצאה מכך, לא נוצר חוסר איזון במעלית בין שני החצאים ולא נוצר שום רגע מתגלגל שהיה גורם להתהפכות המסוק. שם לעולם אל תחרוג מהמהירות במקרה של מסוקים עם תצורה זו הוא גדול יותר משום שהדוכן של הלהב הנסוג אינו מחייב כמו בתצורה הסטנדרטית, אולם הוא תמיד מוגבל על ידי המהירות המפעילה את תופעות הדחיסות בקצות הלהבים.
לאחר שדיברנו על "התנפנפות", לכן יש צורך להדגיש בעיה הקשורה להיבט זה הקיימת ברוטורים קואקסיאליים המסתובבים נגד. הלהבים של הרוטורים הבודדים חייבים להיות חופשיים לדשיים, באופן שימזער את חוסר הסימטריה של המעלית. כתוצאה מכך, יש להציב את שני הרוטורים במרחק מסוים זה מזה, כדי למנוע מגע קטסטרופלי בין הלהבים שלהם. זה אומר ש הגובה הכללי של מסוק עם תצורה זו יהיה גדול בהרבה מזה של מסוק עם תצורה קלאסית.
לעומת זאת, העובדה שהם לא צריכים רוטור זנב מאפשרת להם להיות הרבה יותר קוֹמפָּקטִי, מה שהופך את האדריכלות הקואקסיאלית לבחירה מעניינת גם עבור מסוקים שיצאו לדרך. יתר על כן, אחד הגורמים העיקריים לאובדן מסוקים קשור לפגיעה ברוטור הזנב או להעברה המפעילה אותו.
בהקשר צבאי, העובדה שאין לו רוטור הזנב הופכת את ביצוע המשימה לבטוחה יותר, וכן מקטינה את הסיכון להיפגע בחלקים חיוניים במכונה. למעשה, ניתן לשריין טוב יותר את האזור בו נמצאים פירים ההולכה ורכיבים מכניים אחרים של הרוטורים מבלי להכביד יותר מדי על המשקל, בהתחשב בריכוז גדול יותר של מכשירים אלה בהשוואה למקרה של התצורה הסטנדרטית ולכן המשטח הקטן יותר שהוא דורש. הגנה רבה יותר.
לבסוף, יתרון נוסף בתצורה הקואקסיאלית הוא פחות רעש מוצר בהשוואה לתצורה הסטנדרטית. מקור רעש חשוב במסוק הוא האינטראקציה בין הערבוליות המיוצרות על ידי להבי הרוטור הראשיים עם רוטור הזנב ומהירות הסיבוב הגבוהה של האחרון, הנחוצה בשל גודלו הקטן. על ידי ביטול רוטור הזנב, המסוק לכן שקט משמעותית, תוך שהוא מייצר רעש גדול יותר באזור שני הרוטורים העיקריים בהשוואה לארכיטקטורה של הרוטור היחיד.
 מסקנות
מסקנות
לרוב מסוקי ההתקפה שפותחו יש ארכיטקטורה קלאסית, עם רוטור ראשי ורוטור זנב, למרות היתרונות השונים המוצגים על ידי התצורה עם שני רוטורים ראשיים קואקסיאלים נגד סיבוב. המוטיבציה טמונה ב מורכבות מכנית נדרש על ידי האדריכלות הקואקסיאלית. רק חשוב על הצורך ליישם שתי צלחות צלילה, אחת לכל רוטור, המסוגלת להטות באופן דיפרנציאלי ועם סינכרון מושלם וזיווגים מכניים המסוגלים לספק מומנטים מנוגדים לשני הרוטורים. כל זה מביא לתכנון מערכות מכניות מורכבות, ולכן נוטות יותר לתקלות וקשות יותר לתחזוקה.
הרכיב הנוגע ל מומחיות נחוצים לתכנון מערכות מורכבות שכאלה, הנמצאות כיום בבעלות חברות מעטות בעולם. די לומר כי מסוקי התקיפה הצבאיים היחידים המנצלים טכנולוגיה זו באופן מלא מיוצרים על ידי קמוב, ואילו בחזית המערב סיקורסקי פיתח את ה- S-97 "ריידר" (כיום גמר עם אב הטיפוס "ריידר X" בתחרות על מטוסי סיור עתידיים של צבא ארה"ב).
צילום: הרפובליקה הפדרלית הרוסית / רשת / צבא ארה"ב / לוקהיד מרטין